Trajectory Prediction For Self-driving Cars
- Tech Stack: Transformers,Social LSTM and AgentFormer Project sample:
Model Inference.
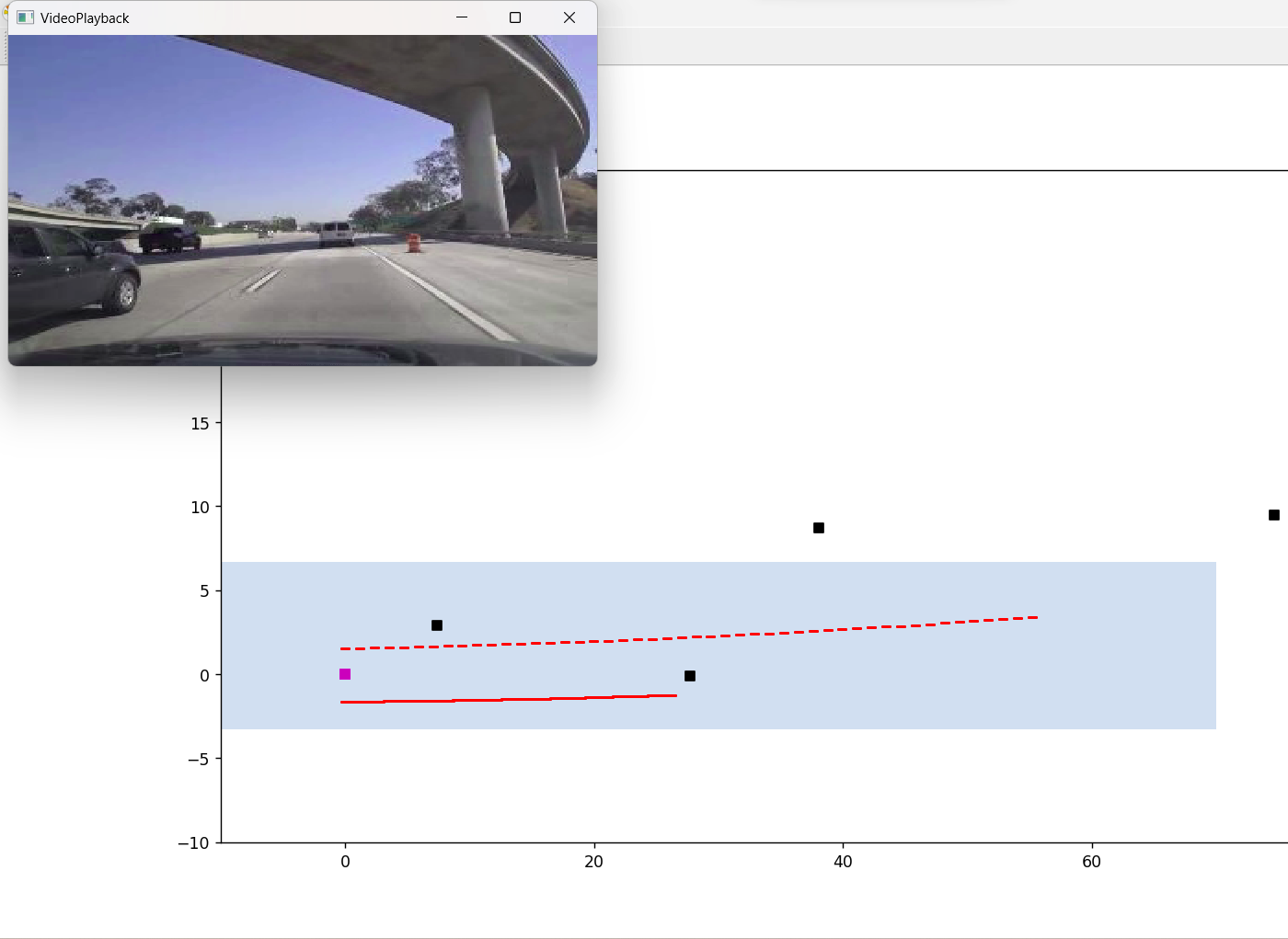
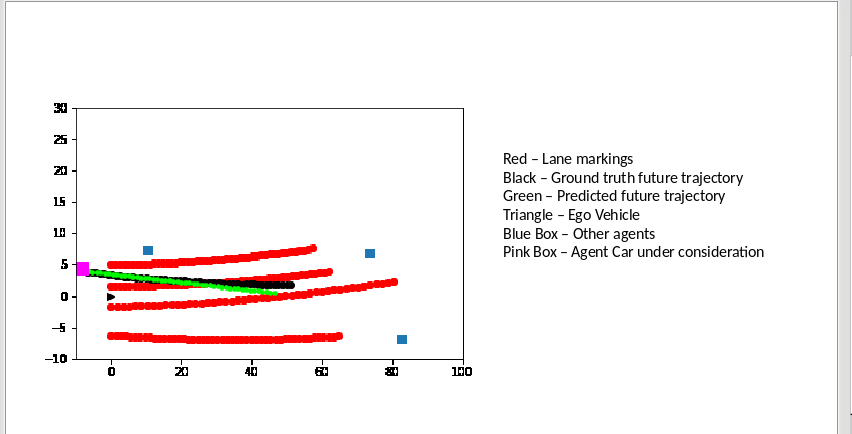
The central focus of the project revolved around the development and implementation of advanced predictive models for self-driving cars, specifically geared towards forecasting the future trajectory of multiple agents on the road. These agents encompassed various entities such as vehicles, pedestrians, and cyclists, all interacting within a dynamic and intricate environment.